DQN是Deep Q Network的简称,是一种将强化学习的方法(Q-Learning)和神经网络(Neural Networks)相结合的一种新的算法。
Q-learning算法是1989年Watkins提出来的一种强化学习的算法,在次基础上2015年nature的论文上提出了在Q-Learning基础上改进的算法DQN。
Q-Learning中需要一个Q表来存储每个状态中不同动作对应的值函数。这种算法在有限状态中会比较有效,但当状态空间变得非常大或者连续的情况下,Q-Learning的算法就需要一个非常大的Q表来存储不同的状态,这样使得算法变得难以实现。因此结合神经网络的方法出现了DQN算法。
DQN可以通过神经网络来拟合状态值,这样就避免了Q-Learning中需要存储大量状态空间的问题。
下面就是DQN的算法更新过程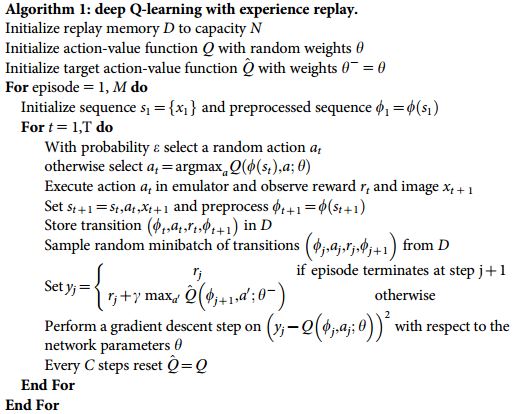
第1行,初始化状态存储空间$D$,存储空间容量为$N$
第2行,用随机权值 $\theta$ 初始化动作值函数的神经网络$Q$
第3行,初始化目标动作值函数$\hat Q$,并且网络权值$\theta^-=\theta$
第4行,循环每一次事件
第5行,初始化第一个状态$s_1$ ,通过预处理得到对应的状态特征 $\phi_1=\phi(s)$ (用来作为神经网络的输入)
第6行,循环每一步动作
第7行,利用$\epsilon$随机选择一个动作$a_t$
第8行,如果$\epsilon$概率没有发生,则选择对应状态中所有动作的最大值$a_t=\arg \max_a Q(\phi(s_t),a;\theta)$
第9行,执行动作$a_t$,得到奖励值$r_t$和推测的下一步$x_{t+1}$
第10行,令$s_{t+1} = s_t,a_t,x_{t+1}$,并且对状态$s_{t+1}$做预处理,$\phi_{t+1}=\phi(s_{t+1})$
第11行,将转移过程$(\phi_t,a_t,r_t,\phi_{t+1})$保存在存储空间$D$中
第12行,从存储空间$D$中,随机采样一组训练数据$(\phi_j,a_j,r_j,\phi_{j+1})$
第13行,判断事件是否在$j+1$步终止,如果终止,则$y_j = r_j$;否则$ y_j = r_j + \gamma max_{a^`} \hat Q (\phi_{j+1}+a^`;\theta^-)$
第14~15行,通过梯度下降$(y_t - Q(\phi_j,a_j;\theta) )^2$来优化参数$\theta$
第17行,每经过$C$步,将动作值函数的预测网络赋值给目标动作值网络网络 $\hat Q = Q $
从上面的算法过程可以看出DQN算法在原有Q-Learning的基础上做了一些改进
首先,DQN利用神将网络来通过状态计算相应的动作值,这样就可以避免在状态空间较大或者状态空间为连续的情况下Q-Learning算法难以实现的问题。
其次,算法通过存储一定数量的过往经历,并在这些经历中随机选择一些进行重复学习(算法第12行),来对神经网络进行训练。这样通过经验进行回放学习的思想来自于人类大脑中的海马体,海马体是人类大脑中负责记忆和学习的部分,当人在睡觉的时候,海马体会把一天的记忆重放给大脑皮层。
最后,通过独立设置目标网络来进行计算目标动作值,这样有利于网络的收敛,这个思想就像Q-Learning与Sarsa的区别一样,Sarsa的动作值更新过程和行为选择过程是相互关联的,这样当状态过多时容易导致算法难以收敛,而Q-Learning的动作值更新和动作选择是两个相对独立的过程,这样可以使算法更容易收敛,同时,在对存储的状态行为进行随机采样时也可以打乱行为之间的联系,也是促进算法收敛的一种方法(算法第12行)。
参考资料:

